The Fascinating Teamwork of Ingenuity & Perseverance
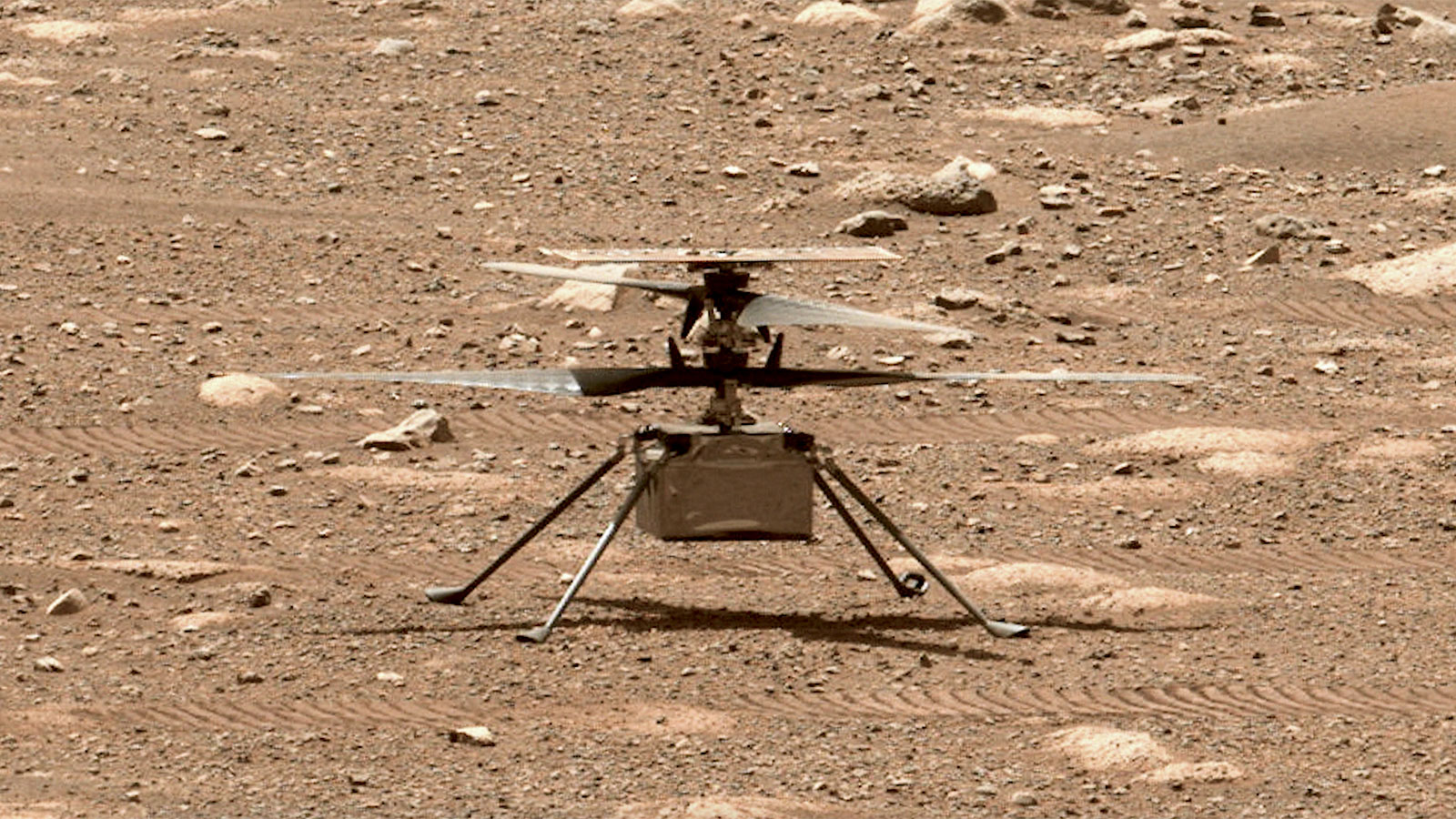
NASA’s Ingenuity Mars Helicopter has completed 51 flights since first taking to the skies above the Red Planet on April 19, 2021. Considering the original demonstration was only up to five flights, this is far greater than NASA expected. Recently, the helicopter has been highlighting the value of this technology and helping Perseverance in its journey.
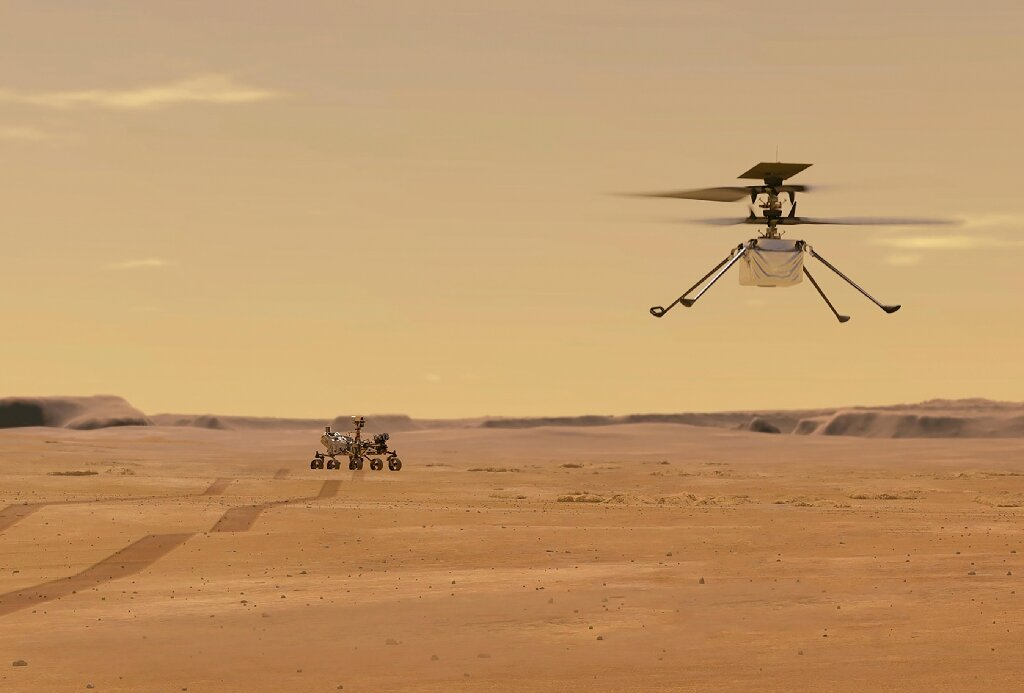
Despite a few issues and complications, Ingenuity has managed to stay ahead of the rover in the past few months. NASA highlights that it’s extremely important for Ingenuity to stay in front of Perseverance while moving through the narrow channels of the Jezero delta. This scouting ensures the rover takes the best path and doesn’t get damaged along the way.
This being said, the agency even lost signal to the helicopter for multiple months before it was reacquired just in time. Here I will go more in-depth into the recent Mars helicopter operations, the teamwork between Ingeunity and Perseverance, what to expect in the near future, and more.
Flight Complications
Before the end of Ingenuity’s primary mission as a technology demonstrator, the helicopter showed that it could provide tactical and scientific scouting for the Perseverance mission. In practice, this hasn’t always been possible, but Ingenuity has indeed proven its worth on more than a few occasions over the course of the mission.
Flight 46 had put Ingenuity within sight of the scientifically important Tenby region, but a number of minor issues delayed the execution of Flight 47, allowing Perseverance to catch up to the helicopter. This precluded any close-up scouting flights of Tenby, as they would require Ingenuity to fly over the rover’s path, presenting an unacceptable risk to both vehicles. Instead, the Ingenuity team attempted to image Tenby from a distance as the helicopter moved farther up the delta on Flight 47.
The field of view of Ingenuity’s Return to Earth (RTE) camera is pointed diagonally downward, capturing a relatively narrow range from slightly above the horizon to roughly 40 degrees below. This narrow field-of-view allows the camera to take detailed images of the Martian surface but leaves little room for error in targeting. Since the helicopter’s attitude (yaw, pitch, roll) naturally fluctuates in response to external factors during flight, features near the boundaries of the planned image are often left outside the actual frame. Features that are far away are invariably near the horizon, and thus close to the edge of the camera’s frame and difficult to capture reliably. This difficulty came into play on Flight 47, with the attempted Tenby scouting images just narrowly missing the main area of interest.
Not long after, Ingenuity’s 48th flight produced a host of aerial images showing the exact area of interest at a resolution several orders of magnitude better than anything prior. All of these images were downlinked to Earth and provided to rover planners and scientists a full two weeks before the rover would reach this area. Unfortunately, that downlink was the last time the team would hear from the helicopter for a long time. Eager to continue up the delta, the team tried and failed to uplink the instructions for Flight 50 several times. Sol after sol, the helicopter remained elusive. Each time, the downlinked telemetry from the Helicopter Base Station (HBS) on the rover would come back showing no radio sign of the helicopter.
Since the first post-winter overnight “survival” on Sol 685, the helicopter had been drifting in and out of nighttime survival mode (having enough power to avoid overnight brownouts). These overnight brownouts lead to uncertainty in Ingenuity’s wakeup time, which make planning much harder. The new transitional power state made morning wakeup times even more difficult to predict, with large fluctuations as the helicopter’s power state neared its overnight survival threshold. Constraints with rover power and instrument scheduling generally prevented the team from searching the entire wakeup range every morning. As a result, the team had spent a substantial number of sols losing, searching for, and then reacquiring the helicopter over the past several weeks.
Fixing The Problem
It was somewhat expected when communication was lost with the helicopter on Sol 755. Standard practice had been to methodically search subsets of the expected wakeup window over the course of several sols, eventually building up enough coverage to catch the helicopter’s wakeup. Shortly after the missed communication on Sol 755, the rover moved to a location immediately southeast of the area to begin a close scientific investigation. This placed it in a deep communications shadow created by the rocky outcrop. As the team continued to cover the nominal search window without success, the thought that this might be a communications issue continued to assuage significant concern.
When the rover emerged from the communications shadow, the helicopter was still nowhere to be found. Teams at NASA continued widening the search windows while doing ever greater mental gymnastics to try to explain how the helicopter might plausibly wake up at those hours. Poor telecom performance was seen as a plausible explanation, but there were reasons to doubt it. In more than 700 sols operating the helicopter on Mars, not once had the agecny ever experienced a total radio blackout. Even in the worst communications environments, they had always seen some indication of activity. This was a mental competition between two similarly unlikely and unprecedented explanations.
Finally, on Sol 761, around a week after the first missed check-in, their communications team observed a single, lonely radio ACK (radio acknowledgement) at 9:44 LMST (Local Mean Solar Time), exactly the time when they would expect to see the helicopter wakeup. Another single ACK at the same time on Sol 762 confirmed that the helicopter was indeed alive, which came as a welcome relief for the team. Ultimately, this first-of-its-kind communications blackout was a result of two factors. First, the topology between the rover and the helicopter was very challenging for the radio used by Ingenuity. In addition to the aforementioned communications shadow, a moderate ridge located just to the southeast of the Flight 49 landing site separated the helicopter from the rover’s operational area. The impact of this ridge would only abate once the rover had gotten uncomfortably close to the helicopter. Second, the HBS antenna is located on the right side of the rover, low enough to the deck to see significant occlusion effects from various part of the rover.
On Sol 762, not long after the radio ACK was received by the HBS, the rover concluded its investigation, turned, and began an aggressive sprint up the delta. At this point, it was closing the distance with the helicopter at full speed. This presented a serious dilemma to the helicopter team. As partially mentioned prior, it’s extremely important for Ingenuity to stay ahead of Perseverance while moving through the narrow channels of the Jezero delta.
The rover was now slated to bring the helicopter inside the 45-meter no-fly zone within the next sol. Despite having not talked to the helicopter in a week, and only the knowing roughly when to expect it to wake up, the team now needed to uplink a flight or risk being passed. Relying on the helicopter’s onboard preflight checks to ensure vehicle safety and banking on solid communications from the rover’s imminent proximity, the team uplinked the flight plan. As commanded, Ingenuity woke up and executed its 50th flight on the red planet, covering over 300 meters and setting a new altitude record of 18 m. The rover had closed to a mere 80 meters by the time the helicopter lifted off in the Martian afternoon Sun. The Ingenuity Chief Engineer at JPL was quoted saying, “It would be an understatement to say that the helicopter team was relieved to see the successful flight telemetry in the Sol 763 downlink the following morning.”
He continued by saying, “Despite the imminent return of Martian summer, it now appears that the dust covering our solar panel will ensure that Ingenuity will likely remain in this transitional power state for some time.
At its core, the Mars Helicopter, Ingenuity, is a technology demonstration to test powered, controlled flight on another world for the first time. It hitched a ride to Mars on the Perseverance rover. Once the rover reached a suitable “airfield” location, it released Ingenuity to the surface so it could perform a series of test flights over a 30-Martian-day experimental window. The helicopter completed its technology demonstration after three successful flights. For the first flight on April 19, 2021, Ingenuity took off, climbed to about 10 feet (3 meters) above the ground, hovered in the air briefly, completed a turn, and then landed. By now the helicopter is not only flying farther but for longer periods of time and helping Perseverance in the process.
Conclusion
Ingenuity has been facing a few complications thanks to dust on its solar panels. Even though the helicopter has been in and out of a powered mode, it’s still sending the occasional signal and performing flight operations. We will have to wait and see how it progresses and the impact it has on the space industry.