How NASA’s Mars Helicopter Survived A Martian Winter
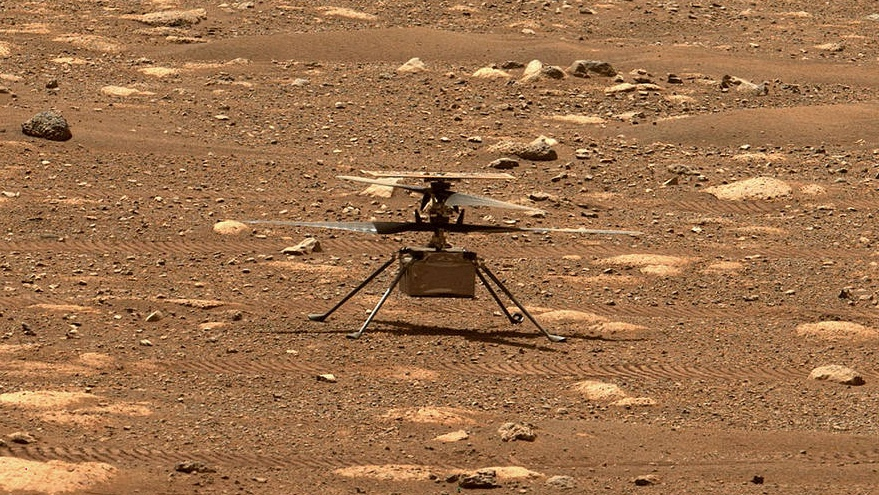
After the Ingenuity Helicopter was deployed on the surface of Mars, NASA began what was expected to be just a month-long demonstration. This has since turned into a multi-year journey testing the small helicopter against much worse conditions than originally planned. This includes the Martian seasons and winter in particular which brings harsh temperatures and weather.
When operating a small solar-powered piece of technology on Mars, these conditions affect almost every part of the mission. From dust on the panels to reduced exposure to the sun and even battery conditions, it’s not easy to survive. All of which make Ingeuity’s current condition even more impressive as it continues to fly around the surface.
This being said, NASA had to do a lot of problem-solving in order to keep Ingenuity running and survive the winter. Here I will go more in-depth into how the helicopter survived, what it was up against, what to expect in the coming months, and more.
Martian Winter
Last year around May, for the first time in the over yearlong extended mission, NASA had a loss of communications with Ingenuity from the downlink of May 3 (Sol 427) and May 4 (Sol 428). Telemetry from Ingenuity confirmed that the loss of communications was due to insufficient battery state-of-charge (SOC) going into the night, which resulted in a reset of the mission clock. This daily SOC deficit persisted for a decent portion of Martian winter (until September/October). However, after a week of anomaly investigation, two sols dedicated to data collection, and the heroic efforts of the Perseverance and Ingenuity operations teams, the agency reported that they reestablished reliable communications with Ingenuity. Quite the feat when looking at the conditions and weather.
At the time, they had reached the point in Martian late fall/early winter when Ingenuity could no longer support the energy demands of nominal operations. Starting on the evening of Sol 426, they believed Ingenuity started experiencing overnight battery brownouts (drops in the battery’s voltage), which reset the electronics. Due to the seasonal decrease in available solar energy, increases in airborne dust density, and the drop in temperatures, the energy demand to keep the electronics powered and warm throughout the night has surpassed Ingenuity’s available energy budget.
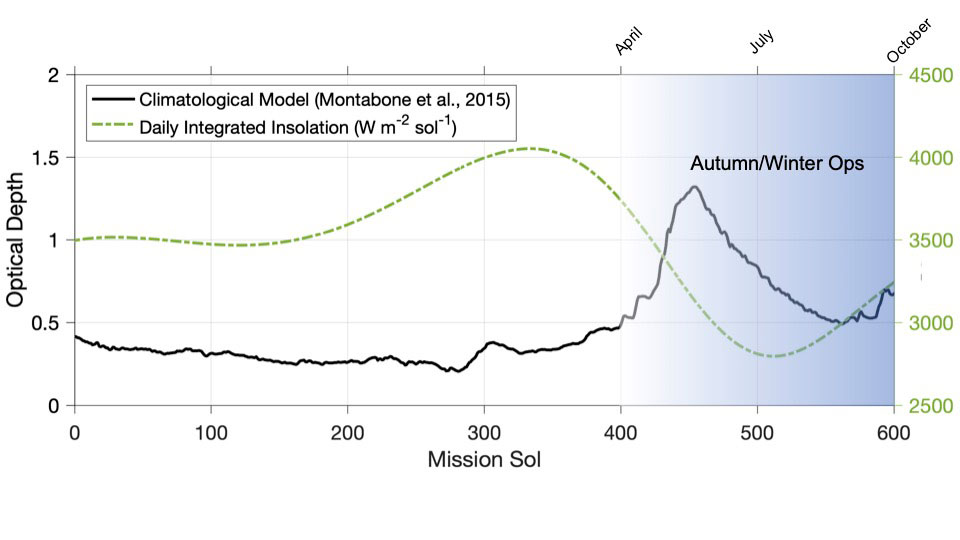
Shown above is a plot of the environmental conditions at Jezero Crater. The black line is a climatological model of airborne dust density (called “tau”) over a Martian year, and the expected daily insolation (amount of Sun’s rays reaching the solar panel) illustrated in the green dotted line. Back in May of last year they were in the part of the Martian year with peak tau, combined with falling insolation. Not shown in this plot is the additional trend of lower average daily temperatures, which also adds to Ingenuity’s energy demand.
While in winter, each night the battery SOC could fall low enough to where the heater thermostat could no longer keep the battery (and surrounding electronics) at their programmed setpoint (e.g. minus 13° F / minus 25 ° C). As a result, Ingenuity’s electronics were reaching overnight ambient temperatures of approximately minus 80 °C (minus 112 °F). The battery could also no longer support the voltage regulators and mission clock. Not to mention, each morning when Ingenuity warms up, charges its drained battery, and attempts to turn on its computer, it is booting according to a misaligned alarm schedule, which is out of synchronization with Perseverance.
When Perseverance attempted communications with Ingenuity on the morning of sols 427 and 428, Ingenuity did not respond because it was waking up at the wrong time. The team reacted by uplinking a full-sol search activity with the Helicopter Base Station (HBS) onboard Perseverance to attempt to communicate with Ingenuity during one of its misaligned alarm widows, which succeeded.
Soon after Sol 429 and nearly every sol since (with the exception of Sols 444 and 445, which did not contain helicopter activities), NASA has been in daily contact with Ingenuity by using similar morning search activities during what they believe to be the most likely times when Ingenuity would be sufficiently charged to attempt booting its electronics. These morning search activities reprogram the helicopter’s mission clock each sol, which, for the duration of that sol, enables additional scheduled activities to make use of the energy that they do have available. At the time, they would reach sunset with ~68% SOC, with an estimated need of at least 70% to keep everything powered overnight. This 2% SOC deficit was expected to grow to a 7% deficit once they reached winter solstice (Sol 500 in July), at which point conditions began to improve.
Helicopter Problems
During this winter season, the agency’s latest models suggested that regardless of modifications to their overnight thermostat strategy, it would be extremely challenging or even impossible to keep the electronics core module (ECM) components warm and within their nominal temperatures overnight. Although component failure has always been a risk that we have carried since rover deployment, that risk became magnified. ECM components were normally kept warm overnight by the battery heater (typically set to 5°, minus 4°, or minus 13°F, or minus 15°, minus 20°, or minus 25°C). They expected that ECM components were thermal-cycling down to the ambient overnight temperatures of minus 112 °F (minus 80 °C). At the time NASA had limited ECM component testing to suggest that select components may survive through the winter, but they couldn’t predict how the entire ECM would fare throughout winter. Cold-soaking electronics is believed to have caused the end of the Opportunity and Spirit Mars rover missions.
Given the elevated risk posture, the focus was to prioritize data downlink from Ingenuity to the HBS. They had a handful of Heli-to-HBS transfer activities left before all unique data were copied from Ingenuity to the HBS. Specifically, they copied flight performance logs, electronics logs, and high-resolution color images from the last eight flights that are still onboard Ingenuity. After all the critical logs were transferred, the team proceeded with a recommissioning phase during which they reestablished Ingenuity’s flight-readiness given the ongoing overnight cold-cycling. Like during the technology demonstration phase, they performed a high-speed spin before proceeding to flight. The idea being, should Ingenuity receive a clean bill of health, they would be ready to execute a short sortie to the southwest in Flight 29.
When Ingenuity is flying, the onboard flight control system keeps close track of the helicopter’s current position, velocity, and orientation. It does so with the help of a sensor suite consisting of an inertial measurement unit (IMU), which measures accelerations and angular rates in three directions. A laser rangefinder, which measures the distance to the ground, and a navigation camera, which takes pictures of the ground below. The data from these sensors is processed by a set of algorithms implemented on Ingenuity’s navigation computer. For the algorithms to function properly, they must be initialized prior to takeoff with an estimate of Ingenuity’s roll and pitch attitude. This is where the inclinometer comes in.
The inclinometer consists of two accelerometers, whose sole purpose is to measure gravity prior to spin-up and takeoff; the direction of the sensed gravity is used to determine how Ingenuity is oriented relative to the downward direction. The inclinometer is not used during the flight itself, but without it we are forced to find a new way to initialize the navigation algorithms prior to takeoff.
During this Martian winter, NASA revealed that one of the helicopter’s navigation sensors, the inclinometer, had stopped functioning. Thankfully, Ingenuity’s sensor suite provides some redundancy when it comes to sensing attitude on the ground. The IMU contains accelerometers, which – just like the accelerometers within the inclinometer – can be used to estimate the initial attitude. On the other hand, the IMU is not purpose-built for sensing static orientation, so its initial attitude estimates will generally be somewhat less accurate.
Taking advantage of this redundancy requires a patch to Ingenuity’s flight software. The patch inserts a small code snippet into the software running on Ingenuity’s flight computer, intercepting incoming garbage packets from the inclinometer and injecting replacement packets constructed from IMU data. To the navigation algorithms, everything will look as before, the only difference being that the received inclinometer packets do not actually originate from the inclinometer. Anticipating that this situation could potentially arise, NASA prepared the required software patch prior to last year’s arrival on Mars and kept it on the shelf for this eventuality. This allowed them to move quickly with the update, and the process of uplinking it to Ingenuity was already underway. These quick fixes along with redundant systems helped Ingenuity survive the Martian winter and continue to operate years after landing.
Conclusion
The Ingenuity helicopter has been through a lot during its mission on Mars. Due to its longer-than-expected mission life, the agency has continued to run into unique scenarios that they weren’t necessarily planning on. We will have to wait and see how it progresses and the impact it has on the space industry.